Dear Sichen,
Thanks for your recent email and kind invitation to this platform. As you invited me to this platform, I assume that you do not mind my responding to you openly on this platform. Another consideration is that our discussion might help others interested in the topic. A further reason is that if I was proven wrong, it would be good to admit my mistake openly, so that others would not be misguided anymore. This is of course a pre-emptive assumption. Having went through my 2003 paper and recovered some of lost memories, I am still convinced what I published in that paper represented a correct account on the subject of twist centre.
Let me take the discussion a step back first. Before any discussion starts to make sense, it is crucial that the definition of the subject, twist centre in this case, is made clear. Unfortunately, once one started searching for its definition, confusion will arise, since it is not unique.
As far as Saint-Venant’s torsion problem is concerned, as presented in most textbooks of Theory of Elasticity, the concept of twist centre is not necessary, as the problem can be formulated completely without resorting to this concept. All the formulation required is an origin of the coordinate system. It is the ORIGIN of the coordinate system as it is called. If one wishes to call it as a twist centre, it is perfectly legitimate. As far as the formulation is concerned, the location of the origin of the coordinate system can be arbitrarily placed and the theory itself does not have any restriction on it. It does not have to be inside the cross-section of the prismatic bar under consideration.
Given the arbitrariness of the twist centre, it can be SELECTED to suit one’s taste. Since the shear centre of any prismatic bar can be uniquely defined, many decided to select the twist centre to coincide with the shear centre, Timoshenko being one of them, followed by many more. In fact, if one did not place any further restriction to the definition of twist centre, there is absolutely no need to prove or determine the location of the twist centre. Any point can be proven or determined to be one, including the shear centre, as well as the origin of the coordinate system, of course!
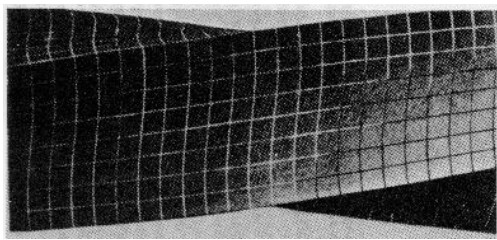
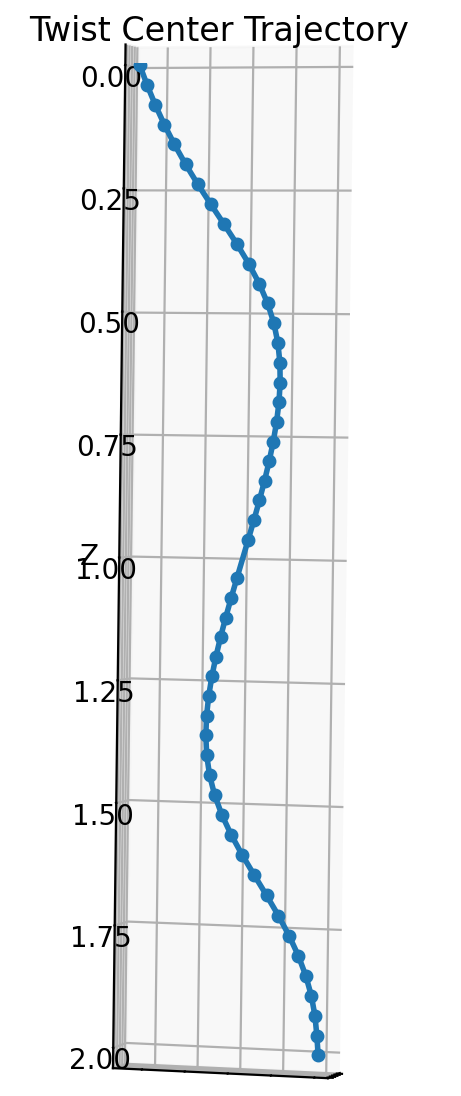
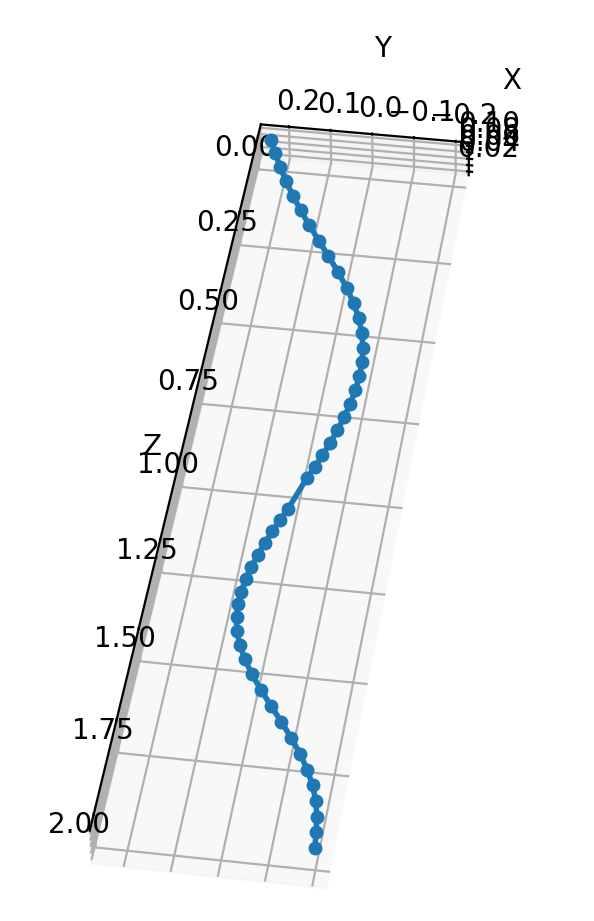
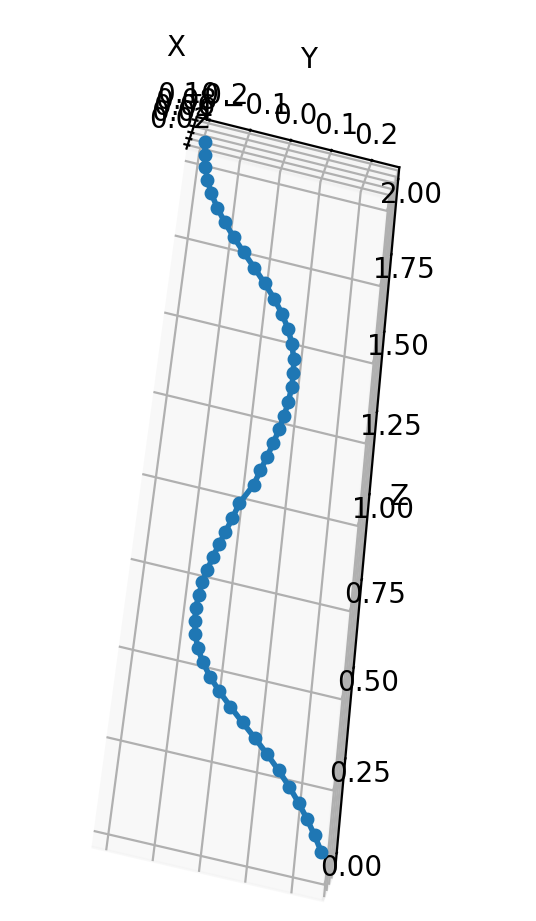
The formulation of the torsion problem is primarily a process of reducing it from a general 3D problem to a 2D presentation after the introduction of a certain pattern of the deformation, characterised primarily by the warping function. Although the mathematical problem to be solved has been reduced to a 2D form, if one did not lose the 3D sense of the problem, he/she could reconstruct the configuration of the deformed bar in his/her mind. If anyone finds it hard to visualised it, reference can be made to the picture of a deform bar of square cross-section as can be found in Timoshenko’s textbook. I have a lot of similar pictures but not sure if this platform allows them to be uploaded. In the deformed bar, each longitudinal fibre gets twisted and forms a helical path in 3D space. A longitudinal fibre in space corresponding to a point on the cross-section of the bar. If an arbitrary point on the cross-section is selected as the twist centre, it will alter its location in space from cross-section to cross-section due to deformation. To ease this uneasiness, Timoshenko argued, as many others, such movement from one cross-section to another amounted to a rigid body motion, which is true under the small deformation assumption.
If one is happy with such an argument, the case should settle here at this point.
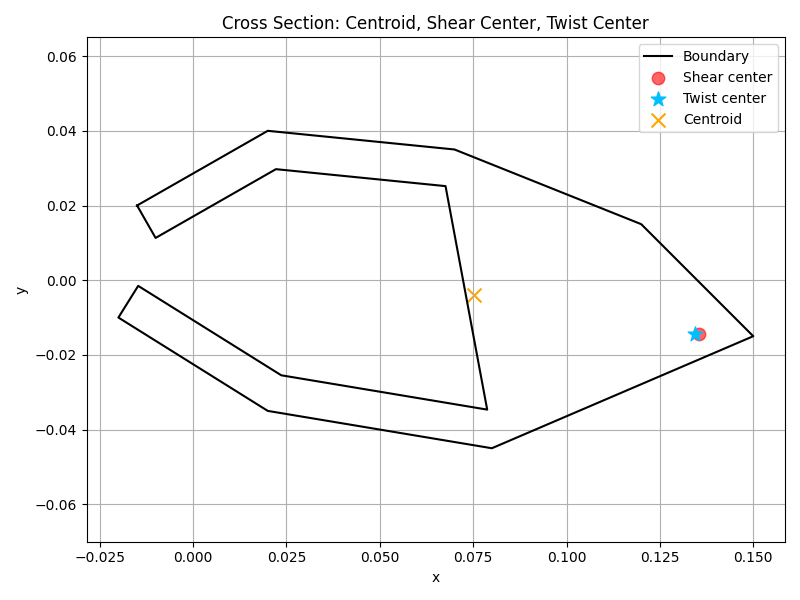
However, the practice and spirit of science is searching, and searching until one is satisfied. My searching was inspired by a further question as I stated in my 2003 paper: Amongst all longitudinal fibres, within or outside the domain occupied by the bar (in the case of outside, the empty space surrounding the bar could be considered as continuous extension of the bar without contributing any stiffness to the bar), there is one and only one fibre that remain straight. Where should this fibre be located? What was proven in my 2003 paper is that this fibre passed the centroid of the cross-section. In other words, when a prismatic bar is subjected to torsion, the trace of the centroid represents as a single longitudinal fibre that remains straight. Without overstretching, this observation remains true even when the deformation goes beyond infinitesimal regime, although this would be another subject.
If one had selected the twist centre for any particular reason, given its arbitrariness, it should not offend anyone, except admitting that its spatial location after deformation would vary from cross-section to cross-section, which should hurt anybody.
However, if one does not have any particular preference, he/she might as well select the centroid as the twist centre. At least he/she is assured that it is always there at the same point after deformation over all cross-sections. The choice rest squarely with the users, of course.
As I said earlier, without further restriction, the location of twist centre is arbitrary. However, if one adds a meaningful restriction, it could then be uniquely determined, coincidence with the shear centre being one of such a restriction. Apparently, by introducing a different restriction, one could end up with a different location of the twist centre. Taking centroid as the one is simply another illustration of the lack of uniqueness of the definition. Through the illustration, it has also been made clear that the lack of uniqueness could be rectified by additional restrictions.
If one reads carefully, in each account of twist centre discussion, if any of them claimed having determined a twist centre, there was an additional restriction associated with, explicitly as I did in my 2003 paper, or implicitly in which case the would be the responsibility of the readers to identify it. Otherwise, picking up a different point, the prove would apply equally. Unfortunately, not all authors were perfectly clear what the additional restriction they had introduced. This is obvious the reason why confusions and controversies often arise on this particular subject.
Having taught theory of elasticity for more than 10 years with the torsion of prismatic bar as one of my favourite topics, I perceive that I had reached to bottom of the problem. Having said so, I am eagerly looking forward to any disagreement proving that my perception was wrong. I will never consider it as any kind of offence or disgrace of mine. Instead, I will be grateful for the stimulus to search for truth further deep down by me or others, like you.
Hope the above elaboration helps.
Kind regards,
Shuguang